
どうも!ずぶ です。今回は ステッピングモーターを動かしてみよう~後編~
ステッピングモーターを動かしてみよう~シリーズの続編となります。
位置決め制御をしてみよう
位置決め制御の、順序としては
- 原点復帰
- 現在値記憶(以下ティーチング)
- ABS実行
このパターンに落とし込めれば、色々考える必要もなく、応用力も非常に高いので、殆どの装置で対応可能となります。
ABS実行 の使い方だけを書いても、マニュアルと同じになり意味が無いので
実践で使える形までを紹介していきます
原点復帰
1.の原点復帰に関しては、以前紹介したものをご覧ください。
シーケンサ起動直後の現在値は、基準がずれている 可能性があるので
原点復帰を行い、現在値を 0 とするのでしたね。
現在値が担保できたなら、後は目標値を放り込むだけ
忠実に、その場所まで行ってくれます
ティーチング
位置決めを行う際、行って欲しい位置を装置に教えてあげなくてはなりません。
その事を、ティーチングと呼びます。
今回は、管理の簡単な パルス で考えてみます。(現在値そのままなので)
とはいえ、数値だけで管理するのも、なんのこっちゃなので
ポジション という考えを導入してプログラム上で扱い易くします。
ティーチング画面を作ろう
まずは、管理しやすいよう画面を作ります
必要な項目を全部突っ込んで、その画面だけで操作完結できるようにしてあげると親切ですね
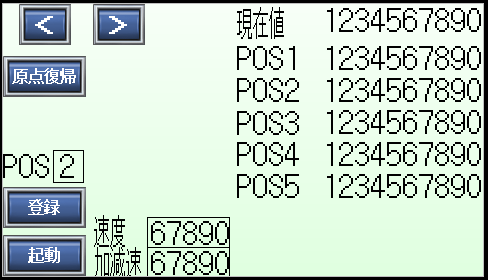
こんな感じでどうでしょう?
□の囲みが入力項目です
< >のスイッチ
ステッピングモーターを動かしてみよう~前編~ で使用したJOG操作です。
登録スイッチ
現在値を選択POSに書き込みます。
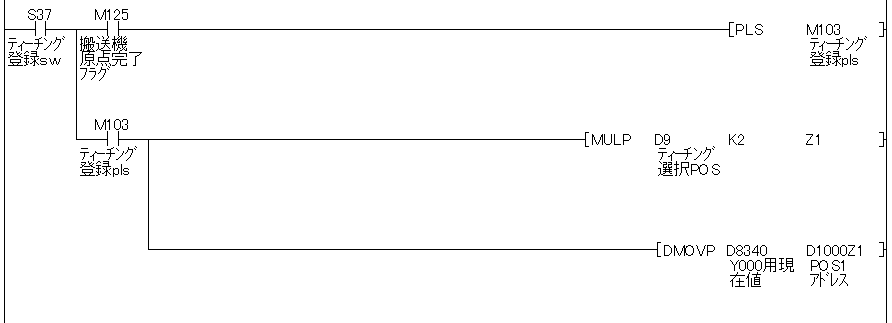
不明データを書き込んでしまわないように、原点完了フラグ を引っかけておきます。
これで、下準備は終わりました。
動かしてみよう
原点復帰完了後、< > スイッチで、希望の位置まで装置を動かしてみて下さい。
この時点の動作は、JOG動作になります。
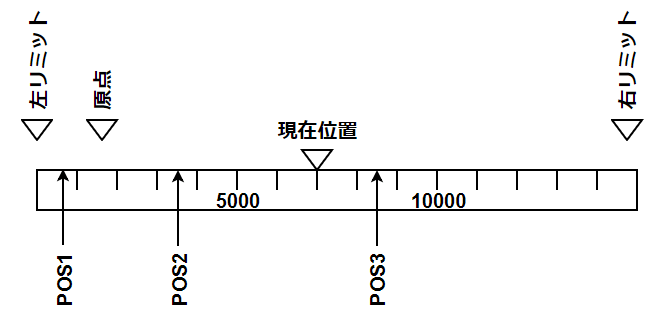
希望の場所に誘導できたら、登録スイッチ で 現在値を選択POSに登録 していきます。
なので、このように組んでいれば、現在値がパルスのままでも、何の問題もありません。
しかし、実測値が欲しい場合は、表示箇所で演算をいれておきます。
目標POS を転送するだけです。
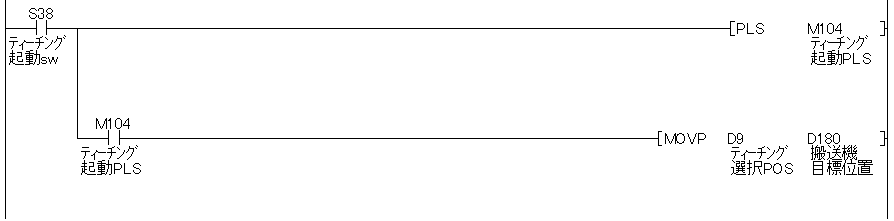
実際のプログラム上では、POS番号だけで動作させたいので、後述の駆動回路で細工を施します
ABS実行
各々のPOSに登録している実アドレスを操作するのは、ここだけにしておきます。
突入条件を入れるついでに、高速、低速を割り振ります。
駆動回路


飛ばしてきた 目標POS を 実アドレス に変換させます

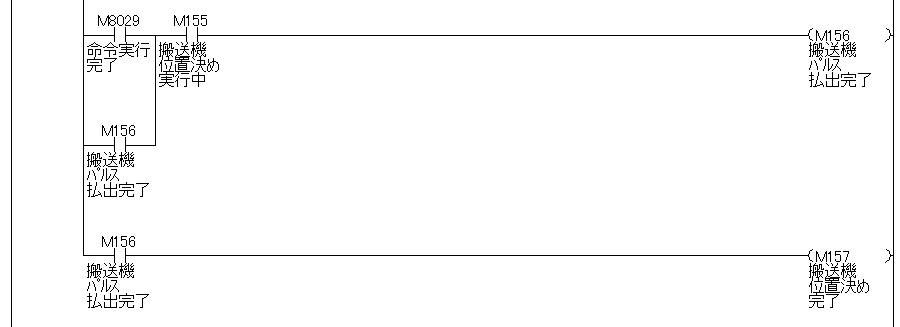
例によって、サンプルとは違いますが、適当に解釈して下さい。(笑)
最後に、選択POSへの紐づけを忘れないように行います。

出力でここまで行っておくと、自動回路の段で楽をする事ができるようになります。
起動スイッチの接点と同じ突入条件箇所に回路を放り込んで行けば、その都度位置決め実行をするようになります。
こちらのプログラムだと、M150 側に入れると高速、M151 側に入れると低速になるよう想定しています。
自動回路
実際の自動回路での使い方は、こうなります
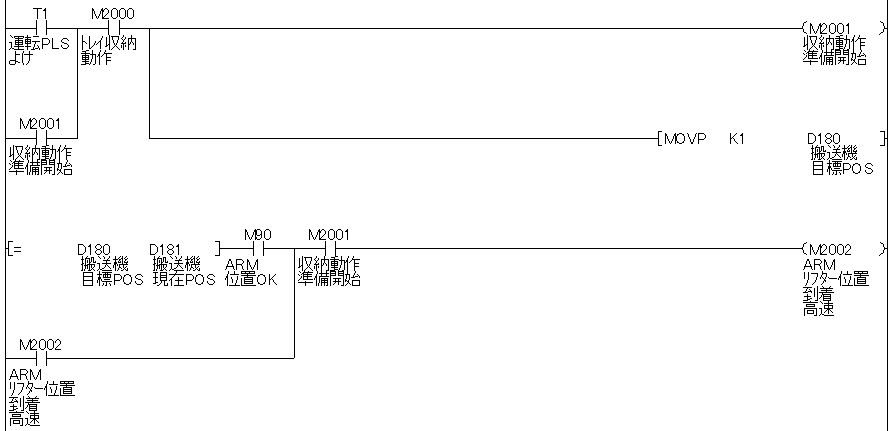
周りのガチャガチャした所はスルーしてもらって、駆動回路の M150 に突入回路として使用していた、M2001とM2002 こちらのコイル間で、駆動回路を回します。
下拵えさえキッチリしていたら、肝心の自動回路の作製に注力できるようになりますね。
まとめ
位置決めを行う上で、原点復帰が非常に大切である事がお分かり頂けたと思います。
選定やプログラムの組み方次第では、そちらも不要になるのですが、やはり気になるのは、コスト
ですが、最近のメーカーさんの努力は目を見張るものがあります。
↓コチラ等は使い勝手もよく、ラインナップも豊富ですよ。
オリエンタルモーターAZシリーズ
最近のコメント