
ステッピングやサーボと聞くと、毛嫌いする人がいますが、自動機が仕事となると、避けては通れない技術です。
だけど、安心してください!
彼らはどんなに格好つけていても、時計回転か反時計回転しかできないのです!(笑)
モータ類はいきなり全開運転というのは、有り得ません
設定 や 配線 や 組み付け や、色んな要因が絡んでいます。
それらを少しづつクリアにして行きながらリリースまで持って行くようしましょう
きちんと手順を追う事が一番の早道だったりするんです
それらをふまえて、ステッピングモーターによる位置決めまでを視野にシリーズで分けてレポートをします
前編 は、JOG運転 これが動かなければハード的要因として切り分けて行きます
中編 は、原点復帰 位置決めを行う上での指標の作り方となります
後編 は、ABS制御 データを放り込んで、その位置まで動かす。一度覚えると何にでも使えて便利な技です。
どうも!ずぶ です。今回は ステッピングモーターを動かしてみよう ~前編~
構成
三菱電機さんの FX3G とタッチパネル
ドライバは適当なのを想定しています。
あわせて読みたい ステッピングモーターを繋いでみよう
位置決めの取説をダウンロードし、必要な部分を表示します。
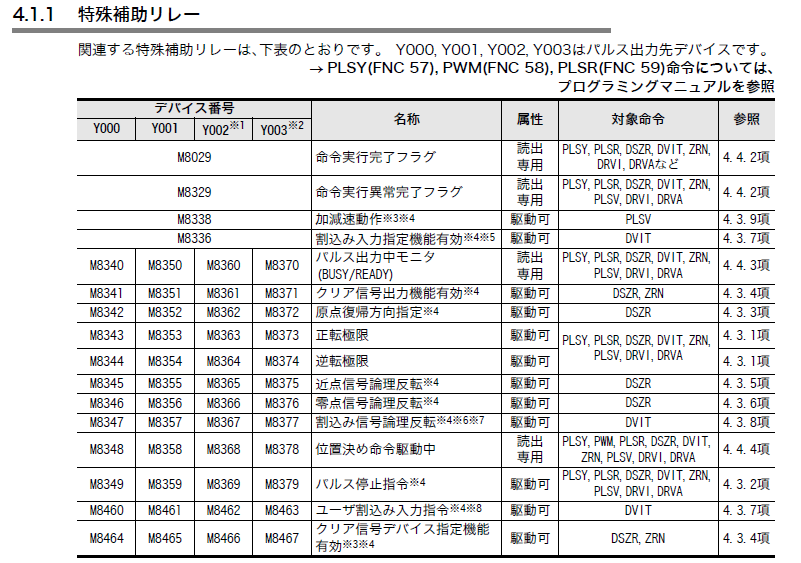
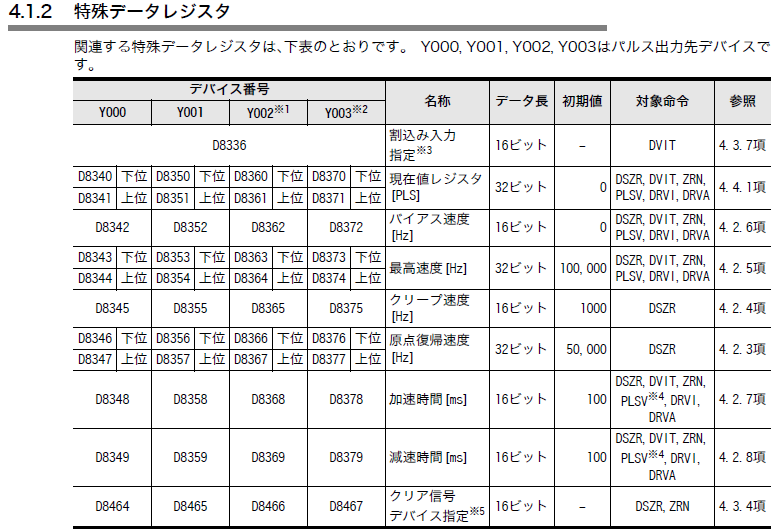
ゴチャゴチャ書かれていますが、本当に必要な箇所は限られてきます。
この手の基本は
リミット
速度
加減速
の3点セットです。
JOGで動かしてみよう
基本動作の事ですね。指令が入れば動くように組みます
まずは、先ほどの設定表を見て、必要な箇所を代入しておきます。

このように、軸毎に固めておくと、後から見やすいですね
次に、スイッチを押している間、JOGが動くようにプログラムします
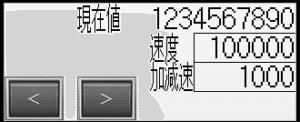
現在値:D8340
速度 :D202
加減速:D204
> :S30
< :S31
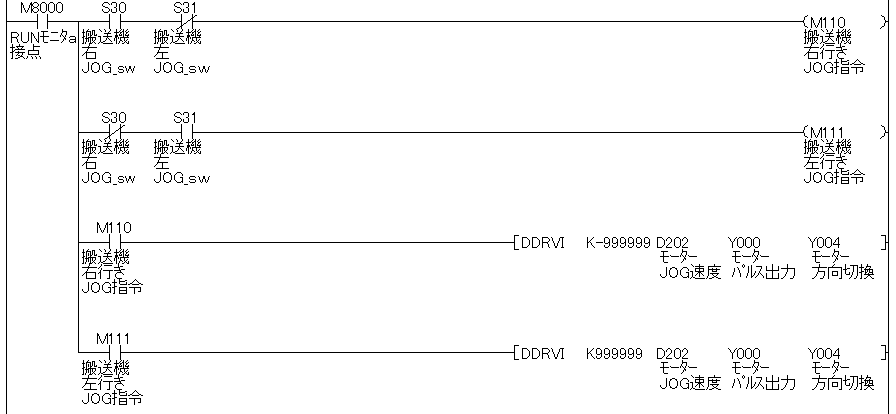
逆に動くなぁと思ったら、 【 DDRVI k999999 】 の符号を入れ替えます
何だか、サンプルとは違うけども、あまり気にしないでおきましょう
JOG動作を確認しよう
とは言っても、設定入れてスイッチ押すだけなのですが、その前に
1 速度は小さい数字から入れて行く
万が一の装置破損を防ぐ為、常に小さな数値から試すよう癖付けておきましょう
1→10→100→1000 といった具合です。
タッチパネルで作った現在値を確認するのも手ですね
2 リミットスイッチを確認する
先ほどの、M8343、44 に代入した箇所です
CW側に動かしながら、CW側のリミットセンサーを入力してみます
CW側への動作が停止し、リミットはそのままに今度は、CCW側へ反転させて動作すればOKです。
立ち上げ時は逆になっている事も多々ありますので、止まらなかった場合、即座にスイッチを離し、リミットを遮っているものを取り外します
リミットセンサーの名称に、CWリミット等付けてしまうと、数が増えると訳が分からなくなりがちです。
装置系に合った、分かりやすい名前をつけてあげると良いかもしれませんね
あわせて読みたい コメントを上手にして、ラダー図を見やすくしよう
それでも動かない
3点セットを確認しましょう。
リミットスイッチの論理が逆かもしれません
現在位置を確認しましょう。
数値が変動しているなら、パルスは払い出されています。
ドライバのマイクロステップを確認してみましょう。
速すぎる
ドライバのマイクロステップを確認してみましょう。
タクトやメカ系の問題にもなってきますが、通常運転速度は、 調整用 JOG速度のせいぜい100倍程度までで、ユーザーさんはそこから5割程度、速度変更できれば十分でしょう。
ステッピングモーターは、これらの上に機能を積み上げて行きます
リミットや方向などをおろそかにすると、必ず二度手間になりますので、ご注意を
あわせて読みたい ステッピングモーターを動かしてみよう~中編~
最近のコメント