
ステッピングモーターを駆動させる為には
モーター
ドライバ
パルス発振器
の3つが必要でしたね。
今回は主に 2相ステッピングモーター を例に、各部の働きを順に見て行きましょう。
どうも! ずぶ です。今回は ステッピングモーターを繋いでみよう
モーター駆動の方式
2相モーターから出ているリード線は、4本 と 6本 があります。
違いは何でしたっけね? 動きから追ってみましょう
ステッピングモーターは、ステーターにローターを引き付けて回しています。
ざっくり言うと、ステーターは電磁石、ローターは永久磁石で構成されているので、ステーターの磁極を切り替えながらローターが進んで行くのですね
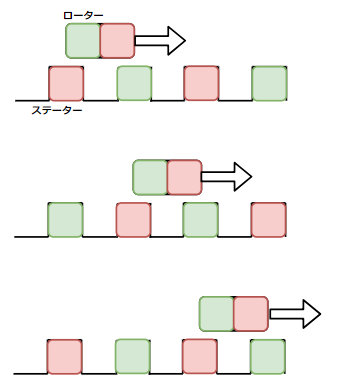
こんなイメージ
どんどんステーターの磁極が切り替わって行ってますね
ステーターは電磁石なので、電流の流れる方向で磁極が変わります
一つを拡大してみると

こんな感じ
これは バイポーラ のモーター に バイポーラのドライバ を接続したものです。
スイッチ1群と2群を切り替えると、電流の流れが変わって磁極が反転するよね
「スイッチの切り替え制御は複雑だし使用部品も多いから、コイルを2つ巻けば簡単に済むんじゃない?」
と、なると

こうなりますよね。
これは ユニポーラのモーター に ユニポーラのドライバ を接続したものです。
絵は1相だけど、2相だと倍
そう、リード線は 4本(バイポーラ)と 6本(ユニポーラ)出てくる
時々、6本のモーター線に4本だけ接続しているケースを見掛けるよね
あれは、ユニポーラのモーターにバイポーラのドライバを繋いだもの。
試しに持ってきてみよう

これは ユニポーラのモーター に バイポーラのドライバ を繋いだもの。
片側のコイルだけを使って、動かしてるよね。この繋ぎ方が ハーフコイル接続
もちろん真ん中の AC を浮かせて、Aー/A で繋ぐこともできるよ。その繋ぎ方が フルコイル接続
ハーフコイルは、モーター内に使わないコイルが余るだけで、モーターに書いてある定格電流をそのまま使えるけど、フルコイルはドライバからの出力を半分にしてあげなくてはならない。
実験や自作なら問題ないけれど、製造装置に組み込んでリリースする場合、フルコイルはまず使わない。(モーターに定格電流が記載されているのに、半分の電流にして下さいとか、事故の元だよね)
これを見て分かるように
バイポーラのドライバは、どちらのモーターも回せる
ユニポーラのドライバは、バイポーラのモーターは回せない
また、イメージはスイッチが描いてあるけれど、実際はトランジスタが内蔵されていて、パルスを貰うたびに、ドライバが上手いことやってくれる(笑)
ドライバの電流値を合わせよう
ステッピングモーターには、型式により 定格電流 があります。
大抵はモーターに銘板が貼ってあって、ステップ角と共に明記されている奴ですね。
(小ぶりのモーターだと、0.8Aとか1.2Aとか書いてあると思います。)
運転電流を変えられるドライバを使用している場合、
「トルクが弱く感じられるから、気持ち大き目に設定しよう!」とか、さじ加減は調整者に委ねられます。
多少オーバーしたからと言って、そうそう焼ける事は無いので、
強いことは良い事だ!
の精神で大き目に設定されている場合が多いのですが、確かに トルクは増大 します。
ですが、その際の 弊害として、バランスが崩れる というのが挙げられます。
先ほどの、ローター、ステータの絵を思い出してください。
引っ付く磁力が強ければ、もちろんトルクは上がるのは分かりますが、
引き寄せ速度や、引き離し速度が問題となってきます。
具体的には、滑らかさが失われて カクカク動く ようになってしまいます。
結果、減速機を入れてみたり、プーリー比を変えてみたり、あてがい対策になりがちなのですが
対策案をメカ屋さんに要求する前に
まずは、電流値が適正かどうか?を確認する事が、電気屋さんとしての仕事ですよ。
あわせて読みたい ステッピングモーターのおさらい
パルスの方式
モータードライバに渡すパルスの形には幾つか種類があるよね

これはもう、ドライバの仕様 だし、書いている以上に種類もある
2パルス入力方式じゃないと動かさないよ!って言われたら、その通り従うしかない
棲み分けは
ステッピングモーター は 1P/2P
サーボモーター(高速仕様) は 差動
くらいの覚え方で十分
何故かと言うと、差動パルス方式はノイズに強くパルス密度を桁違いに出力できる
高速域でトルクが落ちてくるステッピングモーターを高速使用する意義はあまり無いから
パルス密度が違う理由
速度を速くするには、単位時間内のパルス量を増やして行けば良かったよね。
けれども単位時間にパルスを詰込むと、1つ1つのパルスの幅って細くするしかない。
究極的には、ノイズなんだかパルスなんだか、よく分からない事になっちゃう

なので、ノイズとの差別をはかる為、指令パルスの最小幅を決めるのだけど、こんどは詰め込むパルスの量に限界が出てきてしまう。
差動パルスの場合、Aのプラスと/Aのマイナスがセットで1つのパルスとして扱う。
そこにノイズが乗ったとしても、電位差が出来てない以上、パルスとしては認識しないので、パルス最小幅を小さくしても大丈夫なのですね。
差動パルスの場合 専用ICなので、ドライバとパルス発振器を合わせなければならない
パルスの伝送方式
ドライバーへのパルスの伝達には、ラインドライバ(差動ドライバ)と オープンコレクタ(トランジスタ)の2種類がある
先ほどのパルス入力方式の違いが、そのまま伝送の違いになってくる。
項を分けるほどではなかったけれど、装置立ち上げ時の、設定に関係あるか配線に関係あるかの違いになってくるので分けて書きますね。
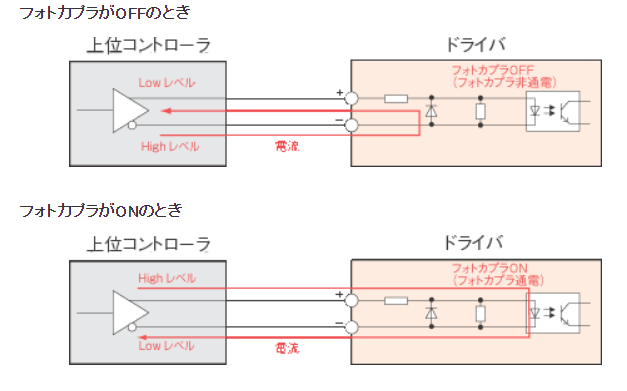
どちらも、ドライバ内のフォトカプラ を光らせてパルス指令を送るので 5V程度 でやり取りが主となります。
1P/2Pパルス入力方式
1P/2Pパルス入力方式は、カタログや取説には オープンコレクタ や トランジスタとも書かれている繋ぎ方。
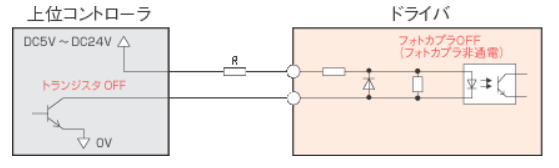
経路途中のRに抵抗を入れてれば良いのだけれど、短距離でノイズを気にしなければ 5Vの電源器を用意して使いまわすと手間がなくて良いですよ。
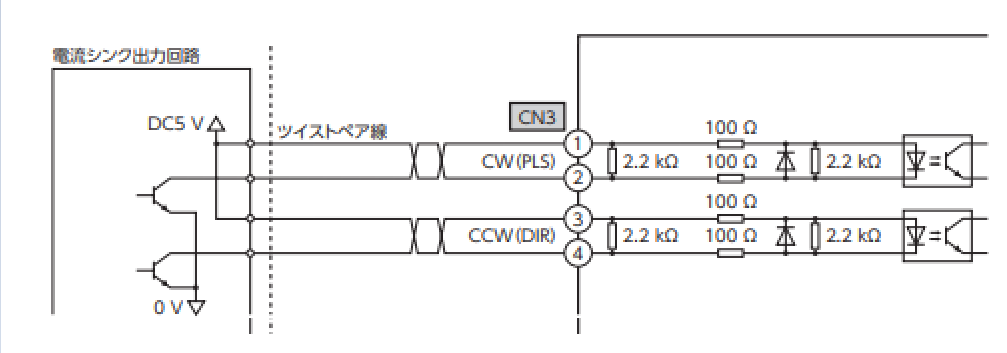
差動パルス入力方式
差動パルス入力方式は、ラインドライバ や 差動ドライバ とも書かれている繋ぎ方。
こちらは、出ている線をそのまま繋ぐだけ なので、24V系で組んでいたりすると手間が無くて良いんだけど、最近は光ファイバーが主流になっているみたい
もっと知りたい時は、照代さんに教えてもらうと良いですね おしえて!照代さん
配線
シーケンサに全てをゆだねるように、パルス列入力で配線をしてみましょう
三菱電機さんの FX3G (40点、60点タイプだと 内蔵位置決めが3軸付いています)を例にとり、実際に配線してみましょう
まずは仕様を確認します
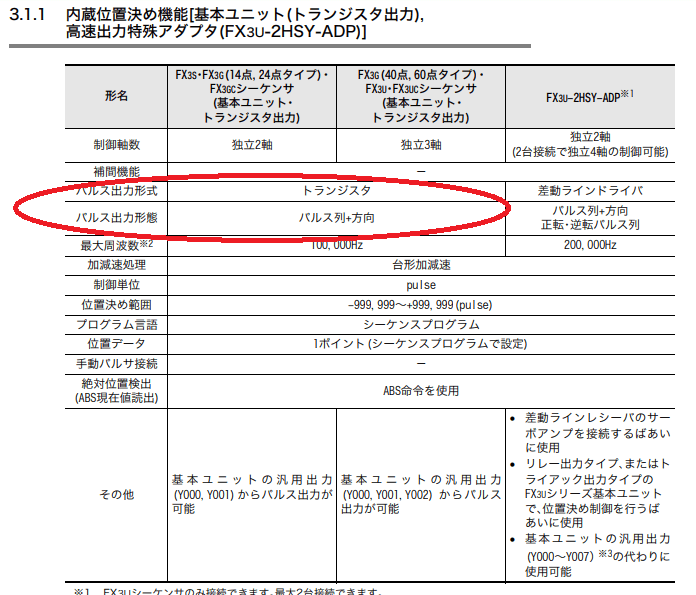
赤〇の箇所 繋ぎは良いですね、パルス出力形態は パルス列+方向 とあるので、1パルス方式って事ですね。
三菱電機さんの FX3G の取説を開きます
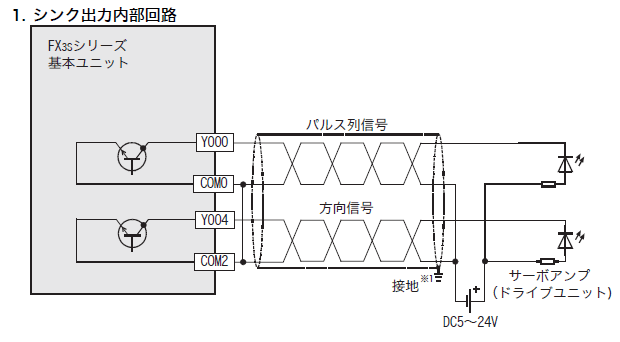
オリエンタルモーターさんの CVD ドライバの取説を開きます
これらを元に、配線してみましょう
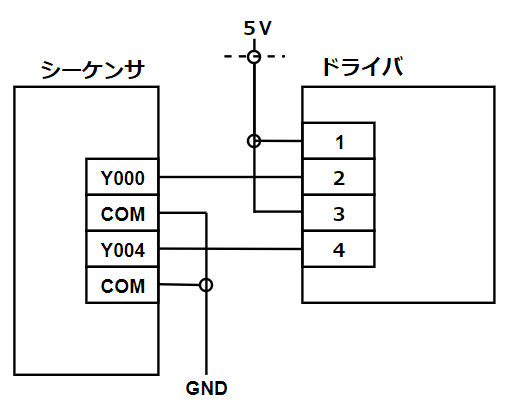
このように、+5v → CW → Y000 → COM → GND と落ちるように配線します。
モーターは、リード線の色を見て合わせて下さい
あとは、シーケンサの命令でパルスを出すだけで、モーター制御できますね
最近のコメント