
チャタリングの起きない、タクト搬送の作り方
センサー依存の装置って、誤動作する事ないですか?
途中でロストしたり、ゴミで動きだしたり。
そんな場合は、ワークをデータに置き換えたら、全部解決です。
タクト搬送を例に、ワークのデータ化を一緒に考えてみましょう。
どうも!ずぶ です。今回は チャタリングの起きない、タクト搬送の作り方
自動機に於ける、データ管理とは何だろう?
装置の動きに合わせて、データ化したワーク を処理して行く方法です。
そこには、センサーがONしている間処理継続、というようなプログラムは存在しません。
データが来ているから処理するのです。
構造次第で、受け渡しトリガーがセンサーの場合もありますが、処理するかしないかは、データの有り無し です。
タクト搬送
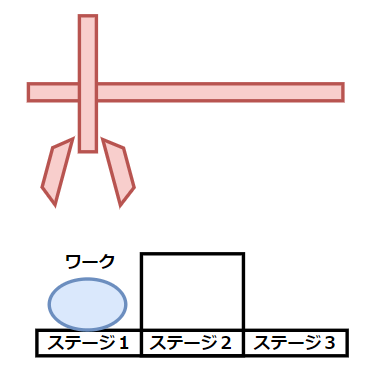
想像しやすいよう、タクト搬送の装置構成図を書きます。
左上の数字は動作順です。


上下左右のシリンダーがワークをタクト搬送するイメージです
まずは下準備
各ステージのデータマップを作製しましょう
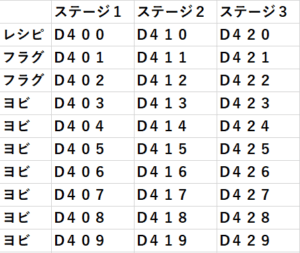
レシピ欄に数値が入っていれば、そのステージの処理を行うようにしていきます。
いくつかフラグを用意しておくと、小技が効くようになるので便利ですよ
こちらもオススメ レシピとデータマップの作り方
プログラム
搬送の動作プログラムは、まぁ不要ですよね。
先ずは、ワーク投入箇所のプログラムを作製しましょう。
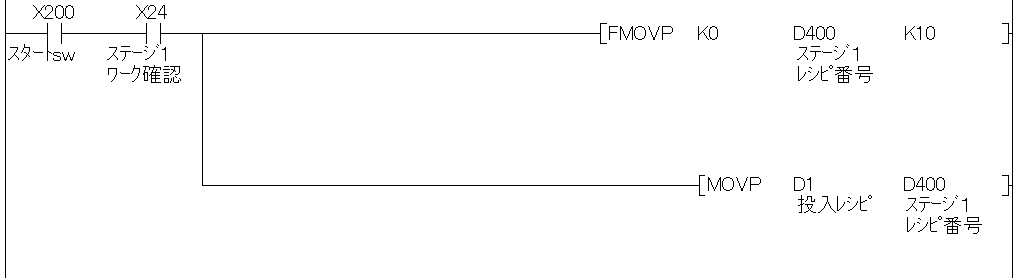
例えば、レシピ3 でスタートさせた場合、ステージ1 の D400 に 3 を入れます
ここで ステージ1 に書き込んだデータを、払い出しが完了するまで、ワークと一緒にシフト させて行く訳です。
次に、搬送時のデータシフトのプログラムです。

動作順1→2→3→ とワークが動いて行きますよね。
4まで来たときにワークが ステージ1 から ステージ2 に移動完了します。
なので、動作順4に対応している、コイル M1010 の下降完了で、データも受け渡す訳です。
今回の構成図だと、一斉にワークが動くので、完了コイルで丸ごとデータ転送します
レジスタのままでは取り回しが悪いので、ビットで受けておくと見やすいですね
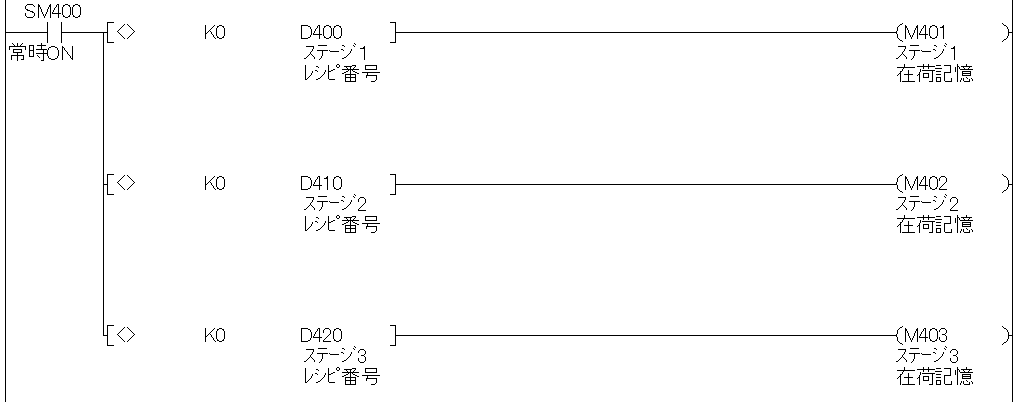
対象ステージのデータに、 レシピ番号に数字が入っていれば、ワークが存在すると認識させるわけです
最後は、ステージ3のデータを、ワークを取った段階で消去してあげます
〔 FMOV k0 D420 k10 〕でデータを消去すれば終了です。
骨格はこれで良しです。
ワークを見るセンサーは、オペレーターがセットボタンを押す、最初だけとなりました。
もし各部にセンサーを付けているなら、それを全て エラー検知 に変えてしまいます。
たとえば、
「 動作3でデータは来たけど、センサー入力が無い 」
等をエラーで引っかけます。
後は、先ほどビット化した、在荷記憶 と レシピデータ を使用して処理を行います。
センサーは一度キャッチするのに使用するだけなので、処理途中でチャタリングやロストを起こしても、何ら問題はありません。
こちらと合わせると便利
STEP処理の作り方
ロボット搬送も同じです
構成図はこうです。UFOキャッチャーを想像して下さい。
搬送パターンは
ステージ1→搬送機→ステージ2→搬送機→
このように流れますね
ワークがステージ移動する際、必ず搬送機に預けられます
そういう場合は、搬送機にもデータマップを割り振ります

先ほどと同じく、ワークの動きに合わせて、データも転送して行くだけですね。

まとめ
もう、お分かりですよね。
タクト搬送から入って、メカ搬送も例に出しましたが、エリア分けできさえすれば、何でも良いんです。
コンベア搬送でも、このエリアに来たよ~ってのが分かれば、紹介したプログラムで対応可能です。
受け付けたデータは、下流まで送り込むか、消去しなくてはなりません。
その為のプログラムは別途に用意が必要です。
最近のコメント