
原点復帰の作り方
位置決めや電動スライダー等を使用すると、原点復帰やHOME動作というものが必要ですね。
あれと同じ事が、装置全体にも言えます。
動作を担保する為の最初の最初に必要な動作。
どうも、ずぶ です。今回は 原点復帰の作り方
原点復帰の目的
まずはイメージし易いように、構成図を見てみましょう。

ローダーのワークを、チャンバーで処理して、アンローダーに払い出す。
何の事はない装置ですね。
ですが、位置決めで駆動している装置が、原点復帰を必要としている状態というのは、装置的にはこう見えている事を意味します。

見えてませ~ん
この状態から、搬送機がどこにあるのかを装置に分からせるのが、原点復帰の目的となります。
逆に、センサーストップ系の装置の場合は、話が早いですよね。
それでは一緒に、原点復帰の作り方を見ていきましょう。
あわせて読みたい。
インダクションモーターを動かしてみよう
電磁弁を使ったシリンダー回路の作り方
原点復帰の階層
いきなり装置全体の原点復帰を考えるのは、あっちもこっちもと、しんどいです。
なので、原点の階層を意識して、それぞれを考えるとスッキリします。
イメージはこうです
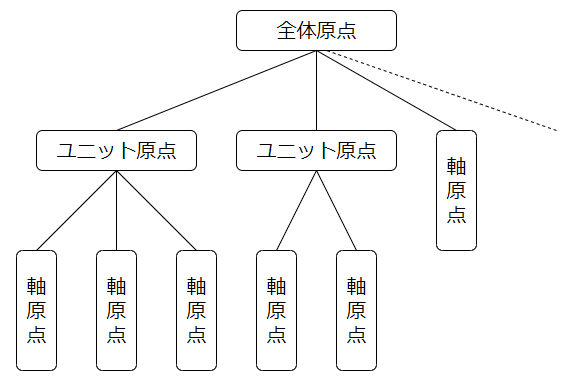
どこぞの組織図のようですね。
軸原点 の集まりが ユニット原点
ユニット原点 の集まりが 全体原点
このように考えておけば、大がかりな装置が来たとしても、つらつらと繋げて行くだけで、やる事はいつもと同じになってくるので、迷いは少なくなります。
一旦、用語を纏めます
― 上下軸だけ、左右軸だけといった、単発駆動部の原点
ユニット原点
― 上下軸、左右軸両方が原点にいて、搬送機がスタンバイ状態
全体原点
― 搬送機1、搬送機2がスタンバイ状態になり、いつでも処理可能である状態
軸原点復帰を作ろう
この階層で重要になるのは、原点復帰の方向 です。
装置的には、先のイメージ図のようにブラインド状態になっているのですから、ここでのコツは
想定されうる最悪のポジション を考えること。
今回の構成を元に、軸原点復帰の方向を考えてみましょう。
上下軸の原点復帰方向
下降する上で、最悪のポジションは、どこでしょうね?
恐らく チャンバーの壁上 ではないでしょうか。

ここで下降を始めると、ガッチャンコ ですよね。
上昇はどこでも大丈夫そうです。
そんな訳で、
上下軸の原点復帰方向は、上昇側 が良さそうです。
左右軸の原点復帰方向
走行する上で、最悪のポジションは、どこでしょうね?
恐らく どちらかがチャンバーの中にいる 事ではないでしょうか。
その状態で、反対側の搬送機が寄せてきた場合、ガッチャンコ ですよね。
そんな訳で、
左右軸の原点復帰方向は、チャンバーから離れる方向 が良さそうです。
軸原点復帰の注意点
センサーサーチ式の原点復帰を選択している場合、上下軸ならば上方向に原点サーチを行い、上端付近で ORG センサーを発見できるような配置にします。
やばそうな場所から逃げて行って、帰ってこないような動きです。
原点復帰動作自体は、位置決めコントローラ等の、コマンドに頼るとらくちんです。
合わせて読みたい
ステッピングモーターを動かしてみよう~中編~
リミットスイッチと通常センサーの違い
ガチャガチャ書いてありますが、やる事は
ユニットエラーを解除して、安全方向に原点復帰動作を掛ける。
それだけです。
ステッピングだろうが、サーボだろうが、FXだろうがQシリーズだろうが、やる事は
ユニットエラーを解除して、安全方向に原点復帰動作を掛ける。
それだけです。
ユニットエラーを解除して、原点復帰動作を掛ける。
ユニット原点復帰を作ろう
この階層で重要になるのは、動作順序 です。
上下軸を下ろしたまま、左右が走行すると・・・
まぁ、その日の内には帰れなくなりそうですよね。
この装置だと、上下軸が上がったのを確認して、左右軸を動かすといった、動作順序が必要 になってくるのです。
ユニット原点復帰を、単独動作させる必要はありません。
相互干渉が有りすぎて、結局 他ユニットの動作にも及んでくる からです。
なので、順序まで考え込んだユニット原点のルーチンは、次の全体原点復帰の際に、装置側から呼んでもらうようにします。
全体原点復帰を作ろう
この階層で重要になるのは、動かすユニットの順番 です。
今回の構成図だと、搬送機を同時に動かしても問題はなさそうですが、装置によっては、
ユニット1を制御下に置いて逃がした後に、
ユニット2の原点復帰を開始するといった動作の順番が必要となります。
プログラム
全体原点復帰の指令を受けて、順番が来たらユニット原点復帰が動くような回路を作ります。
全てのユニットから、原点復帰完了信号が返って来たら、全体原点復帰の完了です
先ずは、全体原点復帰の指令を書きます。

ユニット原点が全て完了したら、全体原点復帰の指令を落とすようにしています。
ユニットのエラーが解除出来ない。等の理由で原点復帰が終了しない事もありますので、タイムアウトで指令を落とすようにしています。
それを受けて動く、ユニット原点復帰を繋げます



(例えば、シャッター開信号や搬送機2の原点復帰完了信号など)
M911-M912で軸原点復帰
M912-M913で位置決め駆動
を行います。
まとめ
軸原点用の停止センサー(ORG)が、全ての位置決めポジションの要です。
このセンサーを動かすと、基準点がずれる事となる為、動かした分だけ全てのポジションがずれてきます。
決して、安易に動かしてはいけません。
ソフトによっては、位置0 決め打ち(軸原点復帰完了地点)でないと動かないように作ってある場合がありますが、それをされると調整が全く効かなくなります。
少し擦ったりするのを、避けたいだけなのに、センサー箇所までアクセスして ORG センサーを動かして、ORG センサーが動いたから、他の場所も再ティーチングを掛けて・・・と、折角、位置決めを使用したのに、残念な事になってしまいます。
ORG センサーは原点復帰用として、ポジションセンサーとしての併用は避ける べきでしょう。
最近のコメント