
コントローラーを引っ付けるだけですぐ動く、メカ屋さん大人気のインダクションモーター!まさに便利さが売りです
だけど電気屋としては、引っ付けるだけ!という訳にはいきませんよね
どうも!ずぶ です。今回は インダクションモーターを動かしてみよう
インダクションモーターを動かしてみよう
インダクションモーターの配線
装置に組み込む場合、やはり制御する必要があります
そこで便利なのが、スピードコントローラー
コンベアの回転なんて、お手のもの
なんたって、スピードをコントロールできるんですから!(そのままですね)
そんな訳で、オリエンタルモーターさんのホームページで調べてみました
上位に出てきたのが、DSCシリーズという奴なので、さっそく取説をダウンロードしてみます
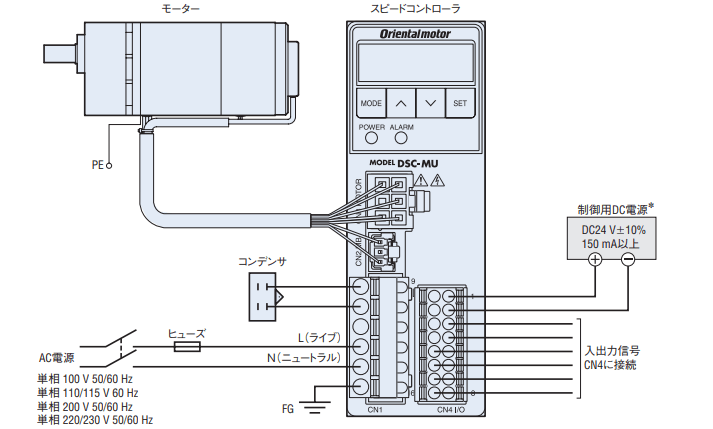
こ、こいつぁ~
クルクルポンではないけども、それでも接続したらすぐ動きそうな勢い
凄いぞ!オリエンタルモーター!
だけど、とっつき始めがいきなりこれだと、古い装置のメンテや保守が出来なくなりそうです
基本的な配線
そんな訳で、SS-21シリーズという取説をダウンロードしてみました(もう売ってないのかな?)
スイッチの箇所をリレーに置き換えると、シーケンサからの制御ができますね
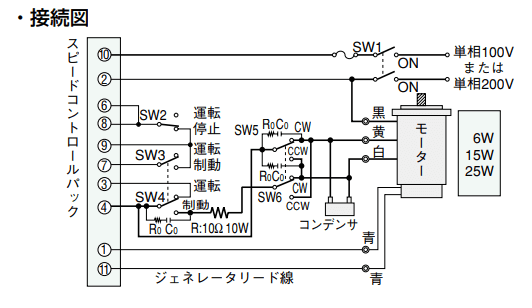
まずはこれで、100Vスピードコントロールモーターの配線から見て行きましょう
図面に落とすのは手間が掛かるので、この図面に落書きしてみます
ハード的な特徴を纏めると
- モーターからの線は5本
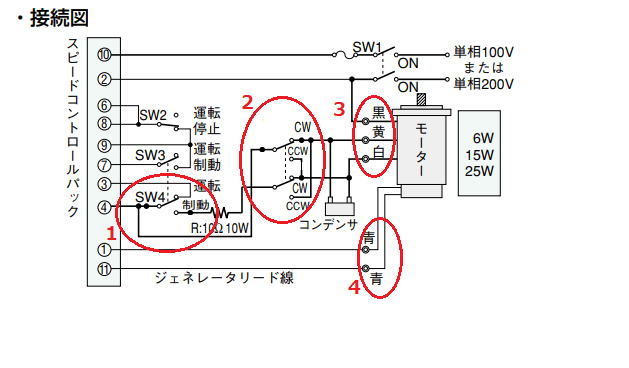
- 3本は動力(〇3,4の箇所)
- 2本のタコジェネは回転数のフィードバック(〇4の箇所)
- 始動にはコンデンサーが必要
- モーターからの黄色と白色の線を、ひっくり返すと反転する(〇2の箇所)
- ブレーキを掛けるには、CWとCCWを同時にONする(〇1の箇所)
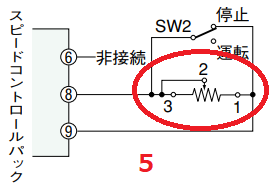
- 速度変更はボリウムで行う(〇5の箇所)
制御しようとすれば、リレーだらけになる事が想像できますね
これらを元に、最初引っ張ったDSCの図面を見ると、また違って見えませんか?
メーカーさんが、何を頑張ってくれているのか、おのずと見えてきますね
また、故障の際などは、ここいらの知識から攻めて行くことになります
プログラム
それでは、実際にインダクションモーターを使った、装置を想定してプログラムを作ってみましょう
その前に構成図
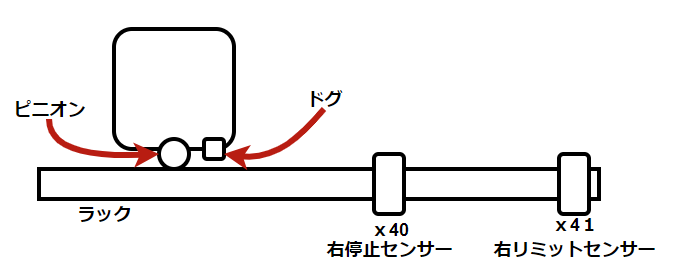
ラックアンドピニオンで、搬送機が走行します。ウィキペディア<ラックアンドピニオン>
搬送機に付けられたドグがセンサーを遮光して、停止します。
あわせて読みたい。
センサーの考え方
プログラムを作ってみました

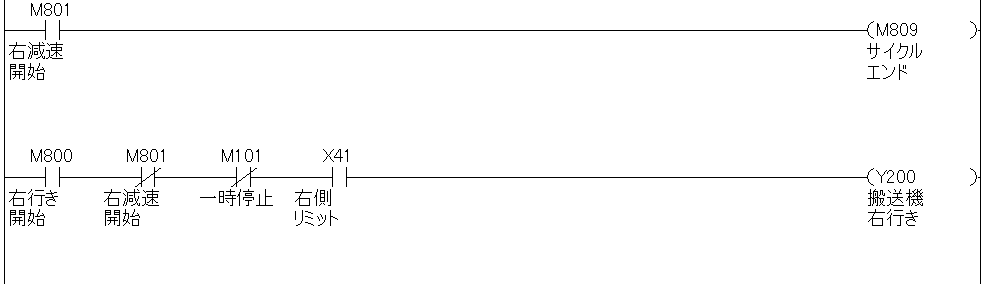
まぁ、こんなものでしょうか
この際、左行きも同じようにプログラムされているものとして下さい
右行き、左行き 動きますね~
そのうち速度が物足りなくなってきます
そんな時は、ボリウムで調整です
目いっぱいボリウムを回して、最大速度で右行き ど~ん!
あれ? 停止位置がずれてませんか?
そりゃそうですね、速度が違うのに同じ場所に止まれる訳がないです
慣性によるオーバーランもあるし、インダクションモーター特有の停止誤差もあります
そこら辺は、みんな大好き照代さんに教えてもらって下さい。教えて!照代さん
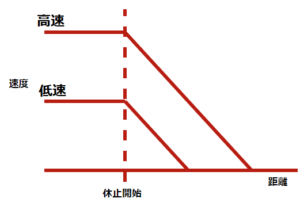
グラフにするまでもないですが、こういうイメージです
位置精度の高め方
そこで、減速センサーを設け、停止誤差を低減させるようにします

先ほどのプログラムに追加してみます
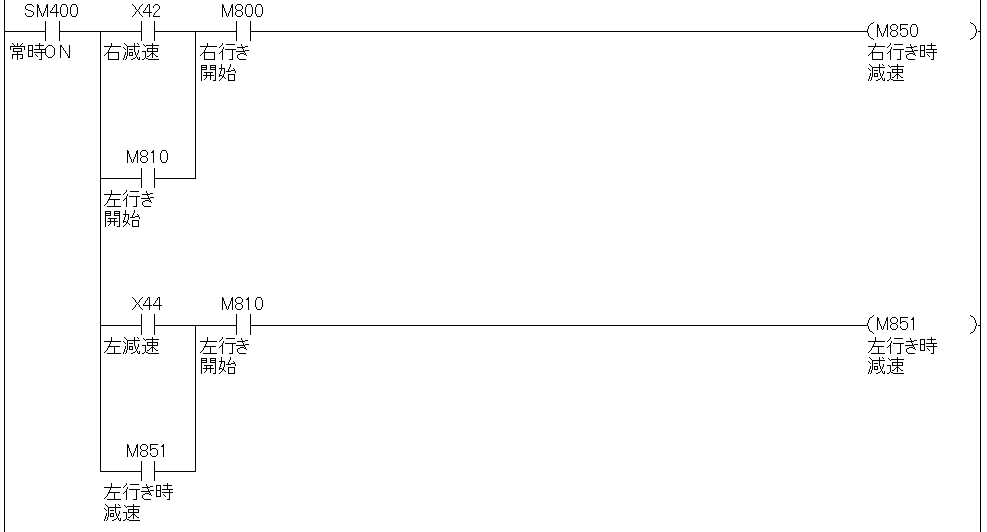
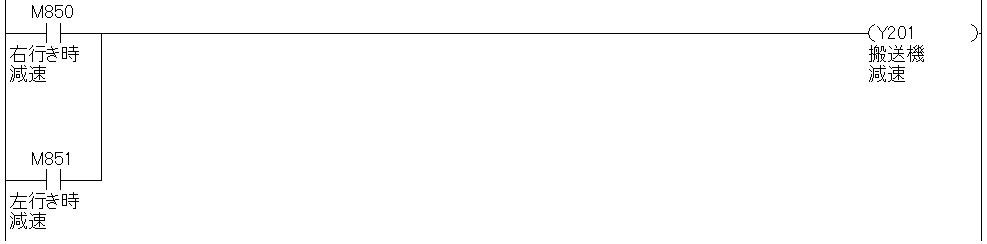
割り込みの場合は、メインプログラムから分離させておくと良い感じです
動作グラフで表すと、こうなります
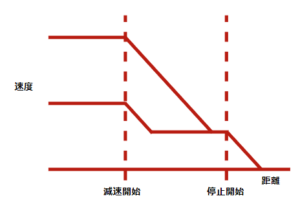
一旦、同じ速度まで落としてから、停止ルーチンに入れます
そうする事で、停止誤差を同じにする訳です
なので、最低でもボリウムを二つ用意して、リレーで切り替えてあげなくてはなりません
この考えは、モーター全体に言える事で、位置決めを使うステッピングモーターやサーボモーターの場合でも
センサーで停止を掛ける原点復帰の時は、この手の動きを意識する事が必要となります
余談ですが、割り込みなのに、繋げて書く人がいます。
こんな感じでしょうか
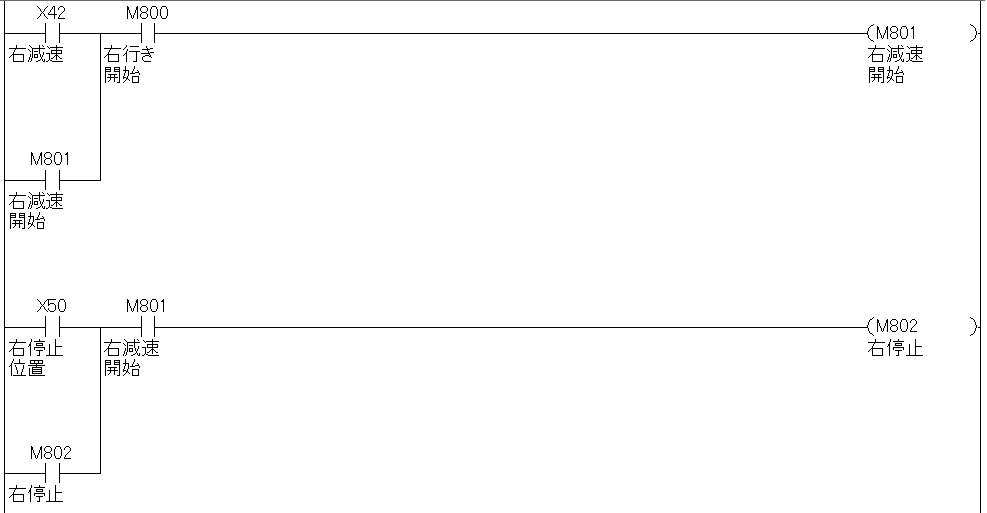
これでも、きっと普通に動くでしょう。
けれど、X42 が破損した場合。面倒くさい事になりそうじゃないですか?
インダクションの位置停止のさせ方
両サイドに動く場合は、先に紹介した考え方で十分でしょう
次に、中央に停止させる場合を、考えてみます
両サイドに減速センサーを置いて、走らせてみました

グラフからも、中央のセンサーの停止位置が、右行き時と左行き時で同じでは無さそうです。
けれども、実際にはこうではありません。
大抵、搬送機モーターには減速機を付けているので、モーターの頑張りよりも移動距離が小さくなりがちだからです
実際はこういう動きになります
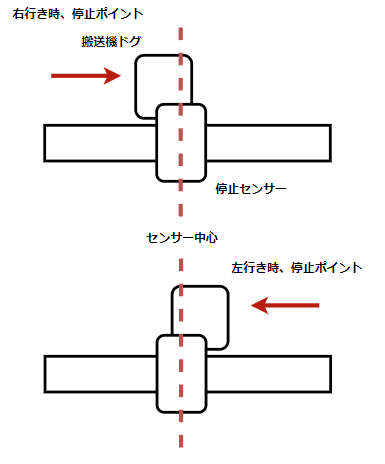
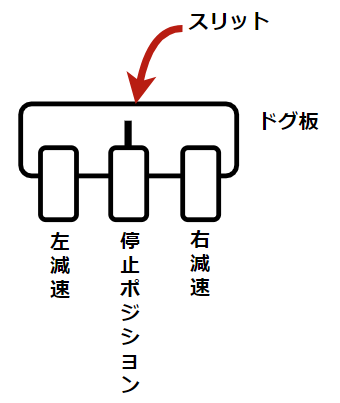
その場合、ドグの形状を工夫したり、停止センサーON後のタイマーで停止をするなどします
ドグの真ん中にスリットを入れ、センサー3つで停止位置を出しているメーカーさんもあります。
再現性を更に高めたい場合は、ステッピングモーターやサーボモーターが選択肢としてあがって来ます
あわせて読みたい
最近のコメント