
お手頃価格で位置決めをしたい!
命じた通りに動いてくれて、普段は動かずじっと待ってる
そんな忠犬のようなモーターを使ってみましょう
どうも!ずぶ です。今回は、仮想の時計モーターを使い、ステッピングモーター説明していきます
ステッピングモーターの基本
1パルス受け付ける毎に、1ステップ動く
そんな理由から、パルスモーター や ステッピングモーター と呼ばれます
詳細はこちらを参照 wikipedia ステッピングモーター
ざっくり言うと、1秒毎にチクタク動く時計のさらに凄い奴ってことです
まずは、その時計を想像してみましょう
60秒で360度、中心シャフトが回転しますよね
という事は、360÷60=6
1パルスで6度動く訳です。これをステップ角と呼びます
1分間に1回転なので、回転速度は1rpm
立派な時計モーターです。

時計モーターを180度回したい(秒針を30秒の場所)場合、30パルス を与えれば良い訳ですね
回転角度を自由に決められて、すごく便利です
時計周りだとClock Wise (CWと言います)
反時計回りはCounter Clock Wise (CCWと言います)
減速機や取り付け方で回転方向は色々変わって行くので、電気屋としては、逆に回るようならひっくり返す位のノリで十分でしょう。
回転
さて、先ほどの時計モーターに戻ります
1秒に1パルス6度ずつ動く事が分かりました。
画面の都合があるので、60度だけ動かしてみましょう(笑)
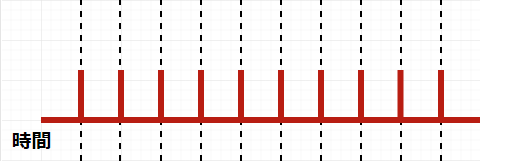
スタートから9秒 都合10秒でパルスを10個払い出しました。1秒間に1パルスです。
角度は先ほどと比べ可変し、60度の位置で停止します。速度はやはり1rpmです
次に速度を上げてみましょう。

スタートから、4.5秒 都合5秒でパルスを10個払い出しました。0.5秒に1パルスです。
角度は同じく60度の位置で停止します。速度は倍の2rpmとなります
脱調
ステッピングモーターは、ローター(シャフトの部分)がステーター(皮の部分)の磁力に吸い寄せられて回転力を産んでいます
先ほどは、2rpm でしたが、200rpm、2000rpmと、どんどん速度を上げて行くとどうなるでしょうか?
電気の切り替えで磁力成分が変わるステーターに対し、ローターの方は実回転でステーターに付いていかなくてはなりません。
そしていつか、付いていけなくなる時が来ちゃいます
いわゆる、脱調 という奴です
脱調を起こした場合、ステーターは気づかずに磁極が切り替わり続けるのに対し、ローターは不貞腐れてプルプルしながら、同じ場所にとどまります
回転している状態ならば結構ついてくるのですが
一番のネックは加減速時です。
ローターに繋がっている、負荷全てを回さなくてはならないので、慣性力が効いてくるんですね
そこで、ローターが付いてこれるように、ゆっくりスタートしてあげます。
ミッション車で半クラを駆使して、4速発進するみたいなイメージですね
パルスの払い出しを表すとこうなります

パルスの密度だけだと、何のこっちゃ分からないので、速度グラフに関連付けて表しています。
図の様に優しく加速減速をすると、脱調せずについてきてくれるようになります。
位置ずれ
脱調は正直、やってみないと分からないところがあります。
この速さで脱調するから、制限7割位にしておこうとか、各思惑で決めます
脱調ならば、機械に付けているポジションセンサー等で、検知できることもあります。
嫌なのは、減速時に起きやすい 位置ずれ でしょう
脱調はローターがステーターに置いてけぼりを食う事で起こります
逆に位置ずれは、停止が急すぎてローターが前に行き過ぎてしまう場合に多発します
前述したように、ステーターの磁力にローターが引っ付いて回っています
なので、追い越した場合脱調しようにも、ローターは慣性力を伴って回っているので、今引っ付いているローターの、先ステップに引っ付きなおしてしまいます。
そのまま指令通り回りましたよ~っという顔をして、位置ずれを起こしているのです。(この辺りは調べずに経験的に書いています(笑)
そうすると、時計モーターで30秒の位置に起動させたのに、32秒の場所に止まっていたりして、せっかくのステッピングモーターが台無しになってしまいます。
この手の位置ずれは、時々起こる事が多いので、皆さん原点復帰を毎回かけたりするのですが、減速を緩やかにする事で解決できる事も多々ありますので、一度試してみる価値はあるでしょう
マイクロステップ
ステッピングモーターの利点は、安く位置決めできる事にあります
時計モーターは1ステップ6度だと書きましたが、時計の秒針を動かすには十分でも、機械を動かすとなると、ちと物足りません
秒針と同じですから、めっちゃカクカク動くでしょう
そこで、疑似的に停止位置をずらせてやります
ローターステーターの、一番引っ付きの良いところが、60ステップあるのですが、それを フルステップ と呼びます
じゃあ、引っ付き具合の1番良い所と2番目に良いところを使ってみよう!
という事で、1番と2番を使うと、単純に120ステップになりますね。
360÷120=3 となるので、1ステップ3度という事になります
3度・・・正直まだまだ微妙です。
きっと、カクカク動くでしょう
じゃあ、3倍、5倍と分割数を増やして行けるのですが、想像通りローターの引っ付き力は低下して行きます。即ちトルクの低下に直結します。
分割の事を マイクロステップ と呼びます
これ以上トルクを落としたく無い場合、トルクを増大させましょう
そういう場合は、減速機 を使います。
減速というからには 速度は減りますが、トルクは上がります。
1/5の減速機をモーターに取り付けた場合、減衰効率を考えなければトルクは5倍
ステップ角は1/5となります。
と、いう事は
マイクロステップ5倍に減速機1/5を接続した場合
ステップ角 =360÷(フルステップ × マイクロステップ倍率 ×減速比)なので
0.24 =360÷( 60 × 5 × 5 )となりますね
1ステップ 0.24度 となる訳です
これだと、時計モーターで30秒の位置に移動させようとすると、750の指令パルスが必要になりますね。
恐らくスムーズに回転しているように見えるでしょう。
あわせて読みたい ステッピングモーターを繋いでみよう
あわせて読みたい ステッピングモーターを動かしてみよう~前編~
あわせて読みたい インダクションモーターの使い方
最近のコメント