
サーボモーターを繋いでみよう。
何でも出来る、サーボモーターを繋いでみよう!
ん?そもそも何でもって何?
三菱電機さんのJ4シリーズを参考に、サーボモーターの繋ぎを考えてみましょう
どうも ズブ です。今回は、サーボモーターを繋いでみよう。
サーボモーターのポイント
サーボモーターを組むに当たって、押さえておくポイントは
クローズドループ
これだけです!
端折り過ぎでしたか(笑)
だけど、全てがこれにぶら下がってくるので、1つずつ見て行きましょう。
クローズドループって何?
システム図は散々見掛けてると思いますが、改めてシステムを見てみると

こんな繋ぎですよね。
なので、モーターに行くケーブルは2本となります。
でもって、クローズドループ(閉ループ)という位なのですから、このような制御の流れになります。

言葉にすると
1.サーボアンプが
回転指令とモーターの状態を見比べて、モーターに出力します
2.エンコーダが
モーターの状態をフィードバックします
ん? そういや、似たようなシステムを見た事ないですか?

そうそう、温度制御とそっくりじゃないですか。
ちなみに動きも、ほぼ同じ
モーター

ヒーター

フォードバック制御 というジャンルなので、同じようになるのは当然なのですが、
ヒーターは簡単に触るのに、サーボを触りたがらない人が多いので、同じような物ですよってのが言いたかった訳です。
ゲインって何?
先ほどの速度時間表を見る限り、オーバーシュートやらを繰り返して、暴れている感じですよね。
そんな時、
温調器だと、オートチューニング を掛けますが
サーボでも、ゲインチューニング を掛けます。。
先ほどのグラフを見る限り、業界最高レベルのサーボアンプが、こんな性能な訳がありません。
チューニングが終わると、はいこの通り

ぴったり追随してますね。
しかし、なぜ ゲイン調整 が必要なのでしょう?
先ほどのグラフにヒントがありますので、拡大してみましょう。

黒線 が 指令値
赤線 が 実測値 です。
少し 遅れ動いている のが分かりますね。
この遅れが、先ほどの クローズドループ で回っている為に起こる 応答遅れ時間 です。
(ちなみに、オープンループだと、黒線の回転数となります)
この遅れの間に起こる様々な要因のせいで、オーバーシュート や ハンチング が発生してしまうのです。
これを、ゲイン調整で打ち消す事が必要となるのですね。
まずは第一歩
インポジションって何?
ゲイン調整前のグラフを見て下さい
ハンチングを繰り返しながら、収束して行ってます。
ゲインを調整して良い感じになったとしても、直線部分を拡大すると、このようなグラフが出てくる訳です。
そこで、一定の振れ幅以下に収まったのなら、それはもうOK なんじゃね?
っていうのが、インポジション です。
クローズドループにぶら下がっていて、かつ意識しておいて欲しいものを、2つ挙げましたが、実際は繋いでゲイン調整したら大体終わりです。
ただ、メカ屋さんが低出力のモーターを選定する癖がある場合は、電気屋さんは大変です。
正直、時間さえあれば、殆どの物は回るのですが、イナーシャ比がメチャメチャになってくるので、オートチューニングだけでは収まらない事も多々あるのです。
そんな時は、不貞腐れながら手動でチマチマ追い込んで行くしかありません(笑)
サーボアンプに配線しよう
せっかくJ4を選ぶのなら、CC-Link IE 等を使用して、配線レスに持っていくべきでしょう。
欲しい数値から何から、全部バッファに入ってくるし、工数も削減できてすごく楽ちんです。
ですが、題名に配線を入れてしまったので(笑)
置き換え等で配線が必要というケースを想定してみましょう。
置き換えの場合、恐らくが上位位置コンだったり、アナログだったりの入出力でしょうから
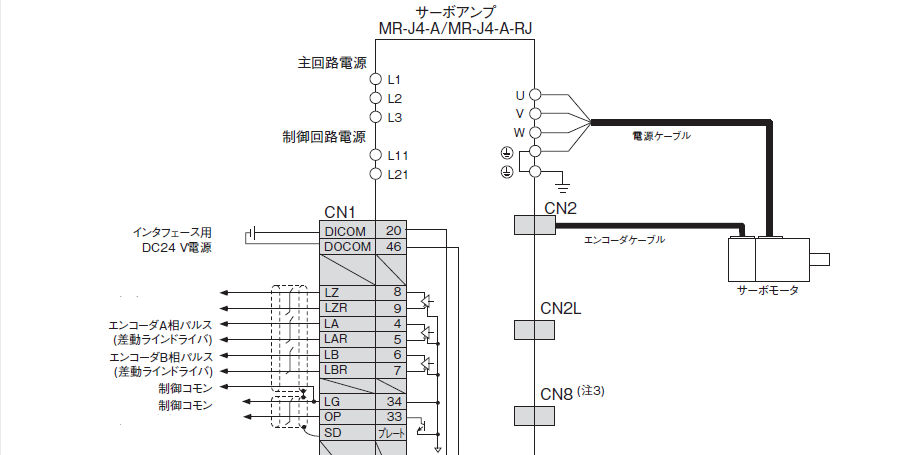
MR-J4-A(-RJ)を選定してみます。


随分オドロオドロシイしい配線図ですよね。
今回は、位置決めで考えてみましょう。
不要な箇所はざっくり削ります。
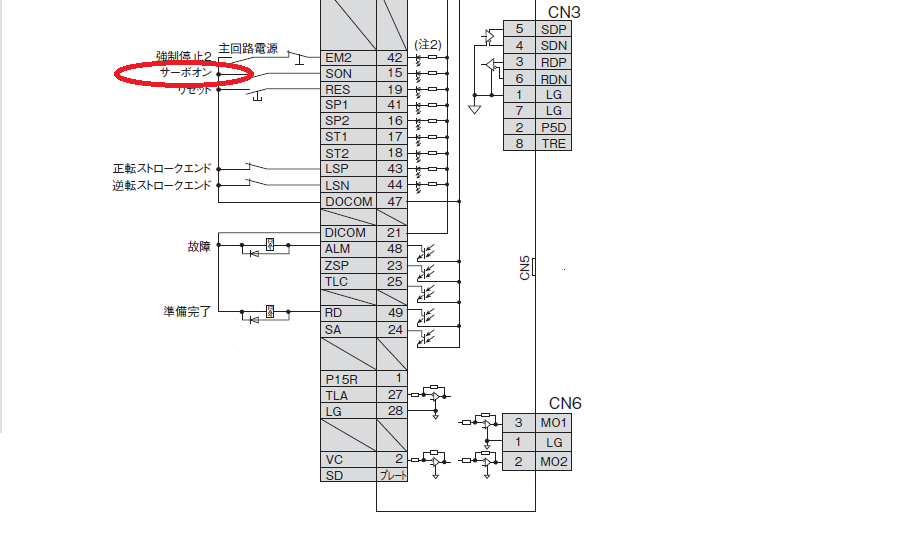
なんかもう、こんだけ
本当に要るのは、サーボON 位
まとめ
もちろん、速度だったり、トルクだったり、狙った機能を生かす為には、その為の配線も必要です。
何でも出来るからには、何でも繋げるように作ってくれているのですが、物怖じする必要はありません。
狙いの最低機能だけ最初に繋いで、後から欲しい機能を追加していくように考えたら、捉え方が楽になりませんか?
三菱電機 汎用 ACサーボ MELSERVO-J4 カタログを参考にさせて頂きました。
最近のコメント