
「自己保持回路」「歩進回路」等と呼ばれていますが
実際口に出して言う人を見たことがないので、ここでは「自動回路」と呼びます
どうも!ずぶ です。今回は自動回路
とにかく、これが出来なければ話にならないのですが
案外、これって決まりはなくて
皆、先輩や師匠の色に染まって行くようです
自動回路の種類
「自己保持」型や「SET、RST」型など、いくつかのパターンがあります
搬送機など機械の動きが絡む物は、「自己保持」「SET、RST」
プロセスや通信など、状態変化が絡む物は「SET、RST」「データ保持」等が好まれるようです
好まれるだけで、指定されない限り、どの様に書こうと問題ありません
だけど、サンプル等をよく理解して、新しい知識を得ていくに越したことはないですよね
自己保持回路
僕がいる業界では、機械を動かしてプロセスに放り込むのですが、殆どの皆さんが「自己保持回路」でラダー図を書いてらっしゃいます
こんなのです
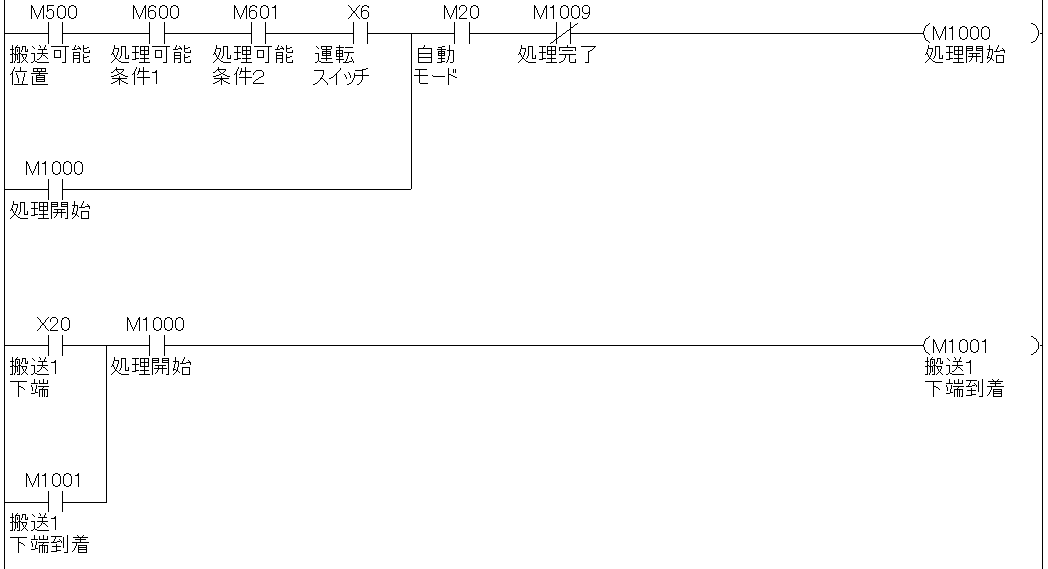

ホッとするでしょ?
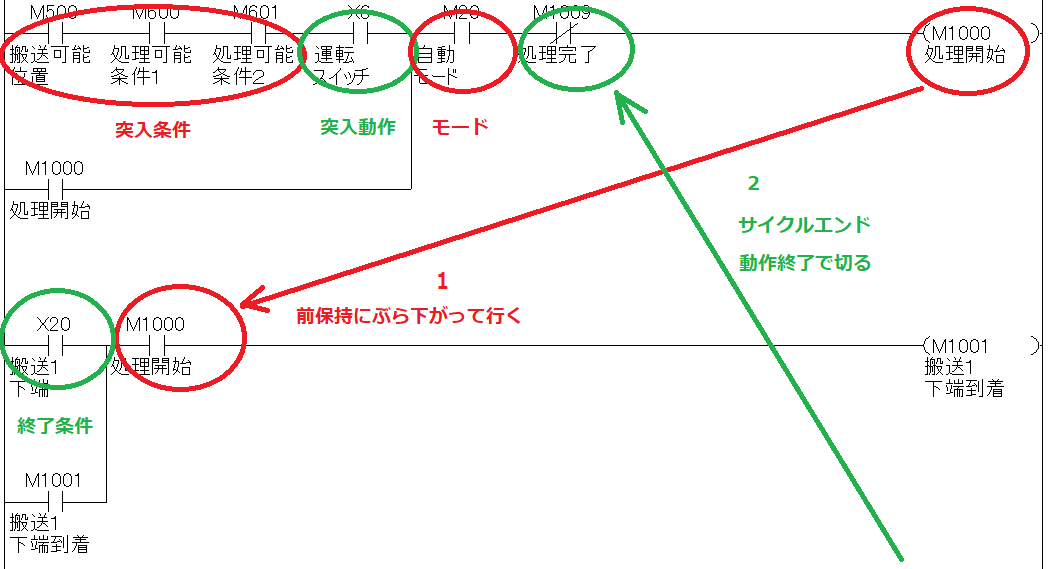
一応、説明するとこうなります
出力回路

長い動作の場合、1の矢印を延々と繋げて行きます
自動モードについてはこちらを参照 自動モードと手動モードの作り方
自己保持型のメリットとデメリット
自己保持型のメリットですが
- ラダーのどこで止まっているか分かりやすい
- 一括で切れるので、搬送機の事故が起こりにくい
- 直感的に繋げやすい
逆にデメリットは
- 分岐条件だと読みにくくなる
- 復帰動作が取りにくい
などが挙げられます
先ほどの回路に、もう少し繋げてみますね
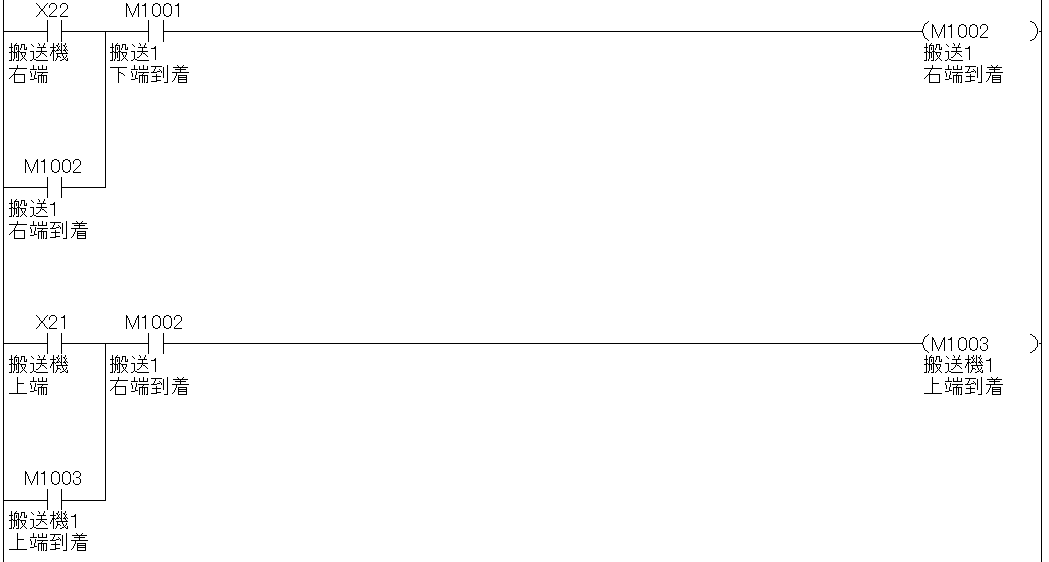

ね?繋げて行くだけでしょ?
でもって、最初に紹介した回路で、M1001 の次に M1009 が出てきた理由も何となく分かったでしょ?
動きが追加になったりとかに備えて、サイクルエンドは少し開けた番号にセットしておくと
後々良い感じですよ
でもって、出力回路はこちら

でもって、装置はきっとこんな感じ
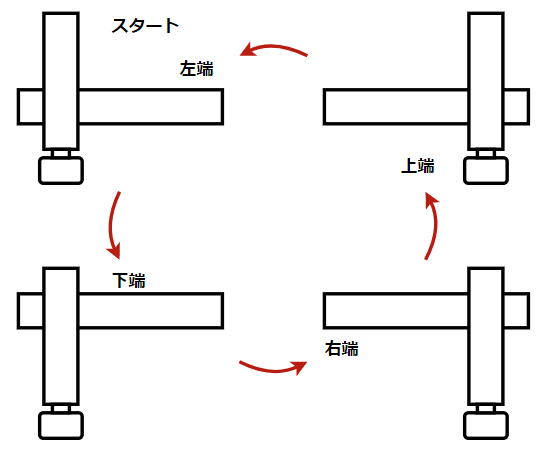
こういう回路では、最後は待機位置に戻します
そうする事で、次の処理に備えるんですね
自己保持型の自動回路だと、この手の突入条件を持っている回路が、あちこちに現れてきます
なので、突入回路を見るだけで、目当ての場所なのかどうか判断して行くんですね
原点復帰とは
では、さらに一歩考えてみましょう
先ほど回路の突入条件をよく見て下さい、何か不思議に思いませんか?
そうですね、あたかもスタート地点に搬送機がいる前提で、全てが書かれていますね
前の処理が終わったのなら、待機位置に移動しているのは、先ほどの回路で分かりました
だけど、それだけじゃないですよね。
電源入れた時に、搬送機が右端にいた場合はどうなりますか?
恐らく処理抜けが発生してしまうとか、動かないとかになるでしょう。
この手のプログラムは、「原点復帰」もしくは「HOME」と言った動作が別途に必要なのです。
(※以後、原点復帰と統一します)
原点復帰とは、上記の回路とは別に装置全体をスタート地点に戻してやる動作の事です。
メインルーチンとは別にプログラムを用意してあげなくてはなりません。
合わせてよみたい
自動モードと手動モードの作り方
原点復帰の作り方
最近のコメント